
- Відмінність і різновиди крокових двигунів
- Конструкція і принцип роботи
- Методи управління фазами
- Способи управління кроковим двигуном
- Мікрошаговий режим приводу
 Кроковим двигуном називають електромеханічний пристрій, що перетворює електричні сигнали в дискретні кутові переміщення валу. Застосування крокових двигунів дозволяє робочим органам машин здійснювати строго дозовані переміщення з фіксацією свого становища в кінці руху.
Кроковим двигуном називають електромеханічний пристрій, що перетворює електричні сигнали в дискретні кутові переміщення валу. Застосування крокових двигунів дозволяє робочим органам машин здійснювати строго дозовані переміщення з фіксацією свого становища в кінці руху.
Застосовуються в станках з ЧПУ, робототехніці, де потрібно дискретні руху, фіксація положення і невелика швидкість.
Відмінність і різновиди крокових двигунів
За принципом роботи вони ближче до двигунів постійного струму. Конструкція електродвигунів постійно вдосконалюється для зменшення трудовитрат при виготовленні, підвищення ККД та збільшення кількість обертів. У них в порівнянні з двигуном постійного струму немає щіток, колектора, а обмотки з меншою кількістю витків.
Серед перших двигунів був створений мініатюрний двигун для ручного годинника і названий на честь французького інженера Маріус лавета. Статор розчіплюючи на краях або в районі ротора має невеликі звуження. Ротор діаметром 1.5 мм, магнітний на основі кобальту. Одна обмотка в один ряд харчування 1.5 вольта. Кут повороту 90 градусів.
Моторчик лавета застосовується також і в медицині для перекачування різної рідини, а також часто використовується в міксерах і блендерах.
Останнім часом ведуться розробки п'єзоелектричних двигунів з використанням п'єзомагнітних ефекту і застосовуючи в конструкції феромагнітні матеріали. Удосконалюються лінійні електродвигуни, у яких вал не обертається, а робить лінійні руху. Для обладнання точної механіки російські виробники випускають двигуни з маркуванням серії:
 ДШ.
ДШ.- ДШР.
- ДШГ.
- ДШЛ.
- ШД.
- ДШЕ
У виробництві їх беруть участь такі підприємства, як НВО «АТОМ», ZETEK, компанія Електропривод, Stepmotor, Вексон, НВО РИФ, Саратовський ел. механічний, корпорація ВНІІЕМ, ЗАТ Уралелектромаш, АРК «Енергосервіс». Виробництвом ШД FL 203, FL 28, FL 57, 35 HS, 57 HS, 17 HD займаються зарубіжні фірми: Fulling motor, Autonics, Motionking YUHA motor, Jlangsu, Phytron і інші. Асортимент ШД різноманітний: по типорозміру, потужності, з вбудованим редуктором і платою управління.
Конструкція і принцип роботи
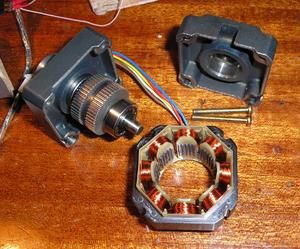
 Кроковий двигун складається з статора і ротора. Сердечник статора виконаний у вигляді набору листів електротехнічної сталі (штампованих). Це зменшує вихрові струми і відповідно нагрівання. Статор по колу розбитий на 4.6.8 поздовжніх пазів. Застосовується і більше. На виступах між пазами розташовуються обмотки у вигляді котушок. Кількість пазів відповідає кількості полюсів двигуна. Чим більше полюсів, тим менше кут повороту ротора, тобто крок.
Кроковий двигун складається з статора і ротора. Сердечник статора виконаний у вигляді набору листів електротехнічної сталі (штампованих). Це зменшує вихрові струми і відповідно нагрівання. Статор по колу розбитий на 4.6.8 поздовжніх пазів. Застосовується і більше. На виступах між пазами розташовуються обмотки у вигляді котушок. Кількість пазів відповідає кількості полюсів двигуна. Чим більше полюсів, тим менше кут повороту ротора, тобто крок.
Ротор складається з одного або двох постійних магнітів, з торців, металеві пластини якого закріплені з зубами. При цьому плюса S і N постійного магніту розбиваються на n полюсів, що відповідає кількості зубів. Це також впливає на величину кроку обертання. За конструкцією ШД випускаються трьох типів в залежності від конструкції ротора:
- реактивний;
- ротор з постійного магніту;
- гібридний.
 Реактивний - ротор виконаний з феромагнітного матеріалу з поздовжніми пазами, полюсами. Він використовується рідко, тільки для виконання простих завдань. В основному через те, що у нього немає стопорящего моменту. Гібридний - ротор виготовлений з двох половинок феромагнітного матеріалу, з поздовжніми пазами і між ними розташований постійний магніт. Пази половинок відносно один одного, зрушені на невеликий кут, для зниження кроку. Вони найчастіше застосовуються.
Реактивний - ротор виконаний з феромагнітного матеріалу з поздовжніми пазами, полюсами. Він використовується рідко, тільки для виконання простих завдань. В основному через те, що у нього немає стопорящего моменту. Гібридний - ротор виготовлений з двох половинок феромагнітного матеріалу, з поздовжніми пазами і між ними розташований постійний магніт. Пази половинок відносно один одного, зрушені на невеликий кут, для зниження кроку. Вони найчастіше застосовуються.
При подачі імпульсного напруги на обмотку статора утворюється електромагнітне поле. Взаємодіючи, з найближчим полюсом постійного магніту створюється крутний момент. Вал двигуна повертається на певний кут. Кут повороту в основному залежить від кількості полюсів ротора.
Такий двигун і буде називатися кроковим. Завдяки невеликим розмірам ШД серії Em 422 застосовується в матричних принтерах.
Методи управління фазами
Управління в основному залежить від кількості полюсів і конфігурації обмоток статора. ШД випускаються в основному з наступними обмотками:
- Дві обмотки з 4 висновками.
- Дві обмотки з 6 проводами із середнім висновком.
- Чотири обмотки - 8 висновків.
 Управляти можна двома методами, використовувати однополярної напруга - уніполярні або двухполярной - біполярний. Уніполярний кроковий двигун має 4 полюса і 2 обмотки. У чотирьохфазна кожна обмотка розділена навпіл і розташовується на протилежних полюсах. Обертання здійснюється почергової подачею напруги на обмотки. При 6 висновках або 5 теж 2 обмотки, але з відведенням від середини. Зазвичай середні висновки котушки з'єднуються разом на мінусовій провід, а плюсової через керовані ключі подається на обмотки.
Управляти можна двома методами, використовувати однополярної напруга - уніполярні або двухполярной - біполярний. Уніполярний кроковий двигун має 4 полюса і 2 обмотки. У чотирьохфазна кожна обмотка розділена навпіл і розташовується на протилежних полюсах. Обертання здійснюється почергової подачею напруги на обмотки. При 6 висновках або 5 теж 2 обмотки, але з відведенням від середини. Зазвичай середні висновки котушки з'єднуються разом на мінусовій провід, а плюсової через керовані ключі подається на обмотки.
Двигуни з біполярним управлінням мають 4 обмотки, по 2 на кожну фазу. Управління відбувається при зміні полярності обмотки. При такому управлінні ускладнюється схема підключення крокової двигуна, але крутний момент при цьому виходить більше. Основні характеристики - напруга живлення, споживаний струм фази, крок, потужність і розмір фланця. Посадочні місця стандартизовані і вказуються як, наприклад, Nema 23. Це відповідає відстані між отворами під кріплення 57 мм.
Способи управління кроковим двигуном
 Застосування ШД в верстатах з ЧПУ конкурує тільки з сервоприводами, наприклад, в ерозійних верстатах або принтерах, вони навіть перевершують їх за своїми технічними можливостями, собівартості і простих схем управління. Управління можна здійснювати на цифрових мікросхемах, спеціалізованих - А3977, на програмованої PIC16, через ключі або драйвери SMSD 1.5.
Застосування ШД в верстатах з ЧПУ конкурує тільки з сервоприводами, наприклад, в ерозійних верстатах або принтерах, вони навіть перевершують їх за своїми технічними можливостями, собівартості і простих схем управління. Управління можна здійснювати на цифрових мікросхемах, спеціалізованих - А3977, на програмованої PIC16, через ключі або драйвери SMSD 1.5.
Більшість драйверів управляються комп'ютером через порти RS-232, USB і LPT. Вони виробляють сигнали управління: крок, напрямок, дозвіл і забезпечують дроблення кроку на ½ до 1/32 і працюють з програмами: MACH3, KCam, DeskCNC, Turbocnc і іншими. Кабелем підключити двигун до драйверу згідно з описом. Вивчивши роботу програми, запустити в роботу нескладно. Для включення використовується напруга від 5 вольт до 48 вольт. Винятки становлять двигуни на 220/110 вольт.
Мікрошаговий режим приводу
Основний час роботи ШД відбувається в покроковому або полушаговом режимі, а при пуску і зупинці бажано використовувати мікрошаговий режим для точної фіксації. Покроковий режим визначено конструкцією і імпульсним управлінням. При мікрокрокової роботі на обмотки подаються синусоїдальні напруги з потрібним зрушенням фаз.
Ротор фіксується при певному співвідношенні фаз струмів в обмотках. Розрахунок точки рівноваги зробити за формулою x = S * pi / 2 * arctg a / b де:
- a - момент, створюваний першою фазою і b - другою фазою;
- x - точка рівноваги ротора або мікрошаг в радіанах;
- S - кут кроку.
 А також треба враховувати максимальну частоту керуючого сигналу, при якій немає втрати або додавання зайвого кроку в процесі роботи. Вона є основним показником перехідного режиму крокової двигуна і позначається в характеристиках, як частота прийомистості двигуна.
А також треба враховувати максимальну частоту керуючого сигналу, при якій немає втрати або додавання зайвого кроку в процесі роботи. Вона є основним показником перехідного режиму крокової двигуна і позначається в характеристиках, як частота прийомистості двигуна.
В процесі експлуатації необхідно стежити за чистотою навколо приводу і не допускати попадання металевої стружки, можливий вихід з ладу ШД. Знайти спосіб захистити привід. Ремонт аналогічний ремонту колекторного двигуна, вимагає акуратності.
Після розбирання взяти і продути стисненим повітрям статор і дрантям протерти ротор. Перевірити відсутність биття підшипників.