
- Що таке частотне перетворення
- вибір двигуна
- Отримання магнітного поля
- Промислові частотні приводу
- Плюси використання частотних перетворювачів
- Векторне і частотне регулювання
- Технічна реалізація ПЧ
- Принцип регулювання швидкості
 Досить часто у багатьох радіоаматорів або просто господарських людей виникає необхідність в регулюванні частоти обертання трифазного двигуна. Використовувати для цього банальний регулятор потужності немає сенсу, тому що він побудований на принципі зміни напруги, але ж, як відомо, двигуни змінного струму не хочуть регулюватися таким способом, навіть однофазні.
Досить часто у багатьох радіоаматорів або просто господарських людей виникає необхідність в регулюванні частоти обертання трифазного двигуна. Використовувати для цього банальний регулятор потужності немає сенсу, тому що він побудований на принципі зміни напруги, але ж, як відомо, двигуни змінного струму не хочуть регулюватися таким способом, навіть однофазні.
Обороти, звичайно, будуть змінюватися, але тільки в невеликому і практично непомітний межі, після чого при досягненні нижнього порогу, а при харчуванні 220 В при напрузі 150 В, обороти і зовсім зупиняються. Якщо з вала необхідно отримає ще й нормальний момент, наприклад, при регулюванні швидкості руху конвеєра або протяжної рейки, в залежності до чого він підключений, то підійде тільки частотний перетворювач.
Що таке частотне перетворення
 Під поняттям частотне перетворення, а далі і частотний перетворювач, слід розуміти цілу систему, яка щось робить. А саме перетворює частоту живлячої обмотки асинхронного двигуна напруги. Тобто акцентуємо вашу увагу на те, що тут змінюється напруга, а саме його частота. У такому режимі управління момент на валу двигуна зберігається при зміні його швидкості обертання.
Під поняттям частотне перетворення, а далі і частотний перетворювач, слід розуміти цілу систему, яка щось робить. А саме перетворює частоту живлячої обмотки асинхронного двигуна напруги. Тобто акцентуємо вашу увагу на те, що тут змінюється напруга, а саме його частота. У такому режимі управління момент на валу двигуна зберігається при зміні його швидкості обертання.
Але щоб зробити перетворювач частоти своїми руками, необхідно згадати конструкцію і можливі характеристики роботи асинхронних двигунів. Більш того, вирішуючи конкретно виготовити такий пристрій, насамперед необхідно знайти відповідний за параметрами двигун, який впорається з покладеної на нього роботою в складі готового комплексу.
вибір двигуна
Для проектування саморобного Частотники спочатку варто згадати, що таке асинхронний двигун і як він працює. Несинхронний двигун або ДПТ являє собою механічний пристрій, що складається з статора з обмотками збудження і ротора. Другий компонент може бути:
 короткозамкненим, тобто середні провідники з'єднані по торцях кільцями, а самі вони товсті і короткі, через що конструкція отримала назву «біляче колесо»;
короткозамкненим, тобто середні провідники з'єднані по торцях кільцями, а самі вони товсті і короткі, через що конструкція отримала назву «біляче колесо»;- фазним, ротор має кілька обмоток, які приєднані до струмознімальних кільцям, застосовуваним для відводу напруги в режимі генератора.
Принцип дії двигуна дуже простий і полягає в вплив створюваного в статорі обертового магнітного поля на короткозамкнений ротор, в якому виникає ЕРС. Через це в роторі починає протікати струм, що веде до утворення сил, які взаємодіють з магнітним полем статора. При цьому частота обертання ротора і магнітного поля нерівні, тож і назву асинхронний двигун.
Розумно припустити, що якщо змінити частоту живлячої статор напруги, то і змінитися швидкість обертання ротора. На ділі воно так і є, тому всі серйозні компанії використовують саме частотні перетворювачі для керування такими моторами. Коли проектується схема частотного перетворювача для електродвигуна своїми руками, слід врахувати тип мотора і все його характеристики. Зокрема, потужність, число полюсів і максимальну швидкість обертання. Завантажити готові схеми можна з інтернет-журналу «Радіокот». Там їх представлено дуже багато.
Отримання магнітного поля
 Для отримання обертового магнітного поля трифазного, необхідно через виток котушки на статорі пропустити струм з необхідною частотою, який буде визначатися за формулою: iA = I m sinωt. В результаті дії цього струму по осі витка починає діяти МДС FA. Так як витки в статорі чергуються по фазах, то і пульсація матиме такий же характер, створюючи загальну пульсуючу силу F, є константою. Вона визначається як корінь з квадратів сил в двох витках, зміщених щодо один одного під кутом 90ºС.
Для отримання обертового магнітного поля трифазного, необхідно через виток котушки на статорі пропустити струм з необхідною частотою, який буде визначатися за формулою: iA = I m sinωt. В результаті дії цього струму по осі витка починає діяти МДС FA. Так як витки в статорі чергуються по фазах, то і пульсація матиме такий же характер, створюючи загальну пульсуючу силу F, є константою. Вона визначається як корінь з квадратів сил в двох витках, зміщених щодо один одного під кутом 90ºС.
В результаті чого виникає обертання поля з кутовою швидкістю, виражену формулою для кожного витка окремо: ω = 2π f 1. Але для розрахунку швидкості поля у всій машині необхідно враховувати загальну кількість пар полюсів, виражене символом p. І тоді швидкість поля буде дорівнює: ω 0 = 2π f 1 / р. Відповідно, можна вирахувати і частоту обертання, виражену в об / хв: n0 = 60 f 1 / р.
Крім цих даних, необхідно пам'ятати, що характеристики будуть відрізнятися від режиму в холостому ході, тобто при ω = ω 0, і при навантаженні, коли ω ≠ ω 0. А також було б корисним згадати, що під навантаженням виникає таке поняття, як ковзання, яке з'являється через відставання ω від ω 0. І воно виражається як: s = (ω 0 - ω) / ω 0. Це говорить про те, що при побудові САУ зі збільшенням цієї величини необхідно автоматично змінювати частоту напруги в обмотках, щоб забезпечити стабільність швидкості при різних навантаженнях.
Промислові частотні приводу
Всі промислові частотники забезпечують різні принципи регулювання швидкістю і моментом на валу асинхронних двигунів за рахунок зміни не тільки частоти, але і зсуву фаз, часу наростання імпульсів, динамічним гальмуванням і багатьма іншими параметрами. При цьому все це виконується в автоматичному режимі без додаткового участі ззовні. Тому промислова схема частотного перетворювача для трифазного двигуна складається з наступних компонентів:
 Центрального процесора, що виконує роль формувача задають і керуючих імпульсів.
Центрального процесора, що виконує роль формувача задають і керуючих імпульсів.- Силова частина: випрямляч і одночасно блок управління, побудований на IGBT - модулях.
- Блок введення і виведення даних або просто інтерфейс для взаємодії з користувачем.
- Перетворювач шини для роботи з системою програмного керування.
Трифазний двигун може бути оснащений датчиком, тоді потрібно зворотній зв'язок. Датчик може бути оптичним, індуктивним або магнітним. У високо спритних двигунах розрахунок швидкості ведеться програмно на підставі характеристик.
Плюси використання частотних перетворювачів
Недарма людина стала активно застосовувати частотні перетворювачі на всіх видах підприємств і навіть в побуті, тому що вони набагато більш економічні, ніж колекторні двигуни і можуть працювати в таких умовах, в яких двигун зі щітками швидко вийде з ладу. Крім усього цього, використання частотного перетворювача дало можливість замінити механічні варіатори з приводними системами, що дозволило набагато спростити конструкцію обладнання. А враховуючи, що ДПТ при роботі практично не вимагає ремонт, то використання ПЧ є просто ідеальним рішенням.
Але слід розуміти, що є межі регулювання, при яких принцип управління асинхронним двигуном також буде змінюватися:
- При регулюванні швидкості в діапазоні 16: 1 і менше, необхідно застосовувати використовувати ПЧ, що працює по вольт - частотній характеристиці.
- Для регулювання в діапазоні 50: 1 необхідно використовувати Бессенсорное векторне регулювання.
- У великих діапазонах слід застосовувати зворотний зв'язок з використанням датчиків або вбудованого в ПЧ під-регулятора.
У будь-якому випадку, коли двигун планується застосовувати в важких умовах роботи, що зазвичай і буває, то краще використовувати саме векторне регулювання.
Векторне і частотне регулювання
 Щоб побудувати якісну систему САУ з керуванням асинхронним двигуном, необхідно добре розбиратися в поняттях, а саме в векторному регулюванні або частотному регулюванні.
Щоб побудувати якісну систему САУ з керуванням асинхронним двигуном, необхідно добре розбиратися в поняттях, а саме в векторному регулюванні або частотному регулюванні.
Частотний принцип застосовується в системах, де немає потреби жорстко контролювати швидкість, а важливий створюваний двигуном потік без значного навантаження. Але коли потрібно з першого обороту забезпечити високий момент і хороше тягове зусилля, то слід використовувати векторне управління.
Векторні САУ також застосовуються в системах, що стежать з невеликими швидкостями подач. Наприклад, в верстатах для подачі столів або шпиндельних супортів. Тут не тільки треба подолати інерцію станини, а й забезпечити необхідне зусилля при обробці деталі.
Проектуючи Частотники для трифазного електродвигуна своїми руками, необхідно враховувати тип навантаження, тому що від цього буде залежати і характеристика управління силовими ключами для досягнення необхідної потужності при мінімальних втратах.
Технічна реалізація ПЧ
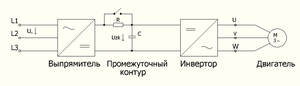
Ось ми і підійшли до побудови блок-схеми керування асинхронним електродвигуном. І відразу варто запевнити, що практично всі виробники цього виду перетворювачів використовують одну і ту ж блоку схему, яка може бути застосована і вами для конструювання власного перетворювача. І вона складається з наступних компонентів:
 Некерованого випрямляча трифазного 380 В або однофазного 220 В напруги мережі.
Некерованого випрямляча трифазного 380 В або однофазного 220 В напруги мережі.- Шини постійного струму з вбудованим LC - фільтром, що складається з набору конденсаторів, які забезпечують її стабільний заряд і виключають пульсації при скачках в мережі.
- Інвертора напруги, що перетворює постійний проміжне напругу в змінну потрібної частоти. Він оснащений ШІМ для якісного управління.
- Асинхронного електродвигуна, яким і здійснюється управління.
Слід сказати, що виробники довго йшли до створення ідеальної ШІМ, за допомогою якої можна було б стабільно управляти двигуном. І тільки з появою IGBT - модулів це стало можливим. Тому і для побудови свого перетворювача рекомендується використовувати ключі з напругою не менше 1200 В з урахуванням можливих пульсацій мережі і з хорошим запасом по струму. На ринку цілком можна відшукати транзистори і модулі до 100 і більше А.
Спрощена блок схема перетворювача буде виглядати наступним чином:
 Випрямляч, його підключення виконується за принципом одне або 2-фазної мостової схемою. Він призначений для перетворення змінної напруги в постійне, придатне для подальшого перетворення частоти від 0 Гц до частоти мережі. Проміжний контур умовно складається з двох блоків:
Випрямляч, його підключення виконується за принципом одне або 2-фазної мостової схемою. Він призначений для перетворення змінної напруги в постійне, придатне для подальшого перетворення частоти від 0 Гц до частоти мережі. Проміжний контур умовно складається з двох блоків:- Пристрої плавного заряду шини, щоб не зашкодить струмопровідні лінії при заряді конденсаторів. Воно отримало назву баластного опору.
- Блок конденсаторів - він же фільтр.
Розрахункове напруження проміжного контуру в √2 разів більше U N. Після досягнення на шині необхідного рівня постійної напруги резистор шунтируется контактної парою. Останній блок у схемі - інвертор. Це остаточний формувач вихідних імпульсів, які потім надходять на двигун, забезпечуючи його обертання із заданою швидкістю.
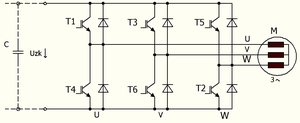
Узагальнене будова силового модуля показано на наступному малюнку:
 Для побудови інвертора застосовуються високо струмові транзистори, що працюють в чисто перемикає режимі. У процесі роботи вони сильно нагріваються, тому встановлюються на великих радіаторах з великою площею розсіювання тепла.
Для побудови інвертора застосовуються високо струмові транзистори, що працюють в чисто перемикає режимі. У процесі роботи вони сильно нагріваються, тому встановлюються на великих радіаторах з великою площею розсіювання тепла.
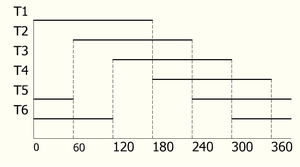
Для проектування схеми управління інвертором, необхідно собі чітко уявити порок роботи ключів. Для цього зверніть увагу на малюнок нижче:
На ньому представлені тимчасові інтервали для кожного з ключів, встановлених саме в такому порядку, як було показано на минулому малюнку. Тобто в фазі U працюють транзистори Т1 і Т4, в фазі V - Т3 і Т6 і так далі. Для кожної з обмоток двигуна паля пара IGBT. При побудові ПЧ для малопотужних моторів з невеликими струмами можна використовувати прості біполярні та польові транзистори.
На тимчасовій діаграмі видно, що в перший момент часу відкриваються транзистори Т1, Т5 і Т6. Далі, транзистор Т1 і Т6 продовжують бути відкритими, в той час, як Т5 закривається і відкривається Т2 і так далі. Ця діаграма повністю повторює діаграму напруг в 3-фазної мережі, але тільки імпульси мають прямокутну форму і мають задану контролером частоту.
В результаті виходить свого роду циклічне перемикання транзисторів, при цьому струм в фазах виходить зрушать на 120º відносно один одного. А для отримання керуючого напруги, що складається з безлічі імпульсів, у вигляді синусоїдального сигналу з мінімальним числом гармонік, користуються відношенням часу включення і виключення транзисторів.
Щоб мінімізувати втрати в двигуні, які зазвичай виникають при спробах регулювання за рахунок зменшення напруги на обмотках двигуна, вдаються до збільшення частоти.
Принцип регулювання швидкості
Для зміни швидкості обертання валу двигуна необхідно змінити частоту f 1, але робити це слід обережно. Адже необхідно зберегти струм намагнічування незмінним. Для підтримки цього балансу U 1 повинні бути пропорційно f 1. але якщо баланс порушений, то струм намагнічування буде або зменшуватися, або збільшуватися. Відповідно, поле буде послаблюватися або перенасичуватися. Щоб забезпечити це u / f -характеристики вибирають лінійної до досягнення кутовий частоти. Вона настає тоді, коли напруга на обмотках підвищується до максимальної позначки.