
- пристрій ДПТ
- Класифікація моторів ПТ
- Особливості роботи вентильних двигунів
- Властивості безколекторних приладів
- Будова крокової типу обладнання
- Принцип дії
Зародження ідеї про роботу двигуна постійного струму (ДПС) з'явилося на початку XIX століття. Відомі фізики Алессандро Вольта, М. Фарадей і П. Барлоу внесли в історію своє бачення цього процесу. Винахідником електромотора по праву прийнято вважати Б. С. Якобі, адже саме йому вдалося виготовити пристрій з обертовим якорем, яке можна було застосувати на практиці. Хоча перший двигун був малопотужним, але наступний вже приводив у рух човен.
 >
>
пристрій ДПТ
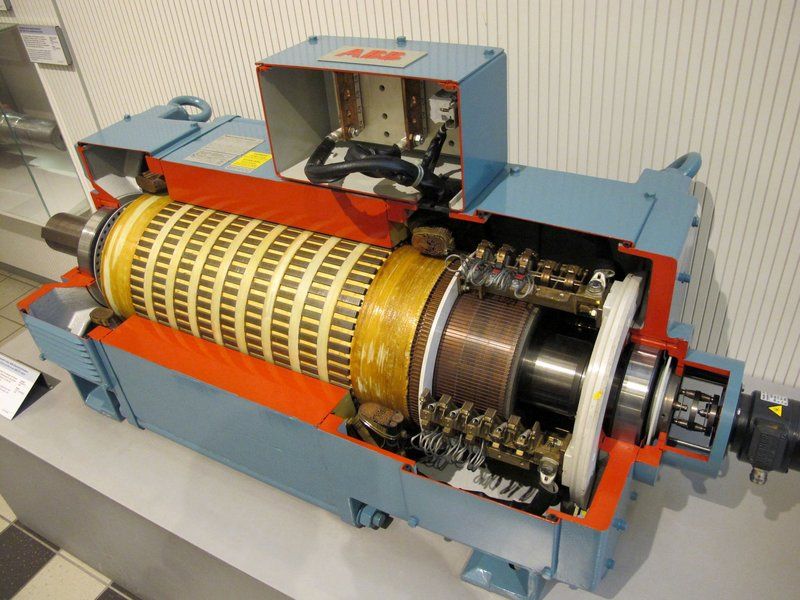
Основними частинами електричної машини постійного струму є магніти і обмотка. До допоміжних частин відносяться корпус, сердечник, вал, колектор, щітковий механізм. Всі ці деталі мають своє призначення.
Сердечники рухомою і нерухомою частин виготовляються не з цілісної конструкції, а з листів електротехнічної сталі. Ця особливість будови дає можливість практично усунути вихрові струми.
Прямим обов'язком колектора є перетворення змінного струму, який виробляється в обмотці якоря, в постійний. Колектор - вузол, характерний саме для машин постійного струму. Але він одночасно і найбільш уразливий, тому що майже половина всіх електромоторів виходить з ладу в процесі роботи саме через його поломки. Відсутність колектора в будові асинхронної або синхронної машини покращує її надійність. Ця перевага зберігається як для трифазних, так і для однофазних машин змінного струму.
Управління двигуном постійного струму на увазі зміну швидкості його обертання, адже основним його завданням є приведення в хід робочих механізмів. Швидкість обертання можна змінювати трьома методами:
- зміною напруги, яка підводиться;
- зміною опору в ланцюзі якоря;
- зміною магнітного потоку в ланцюзі збудження.
Класифікація моторів ПТ
Відмінності між видами електромоторів полягають в типі магнітів і способі збудження. Магніти можуть бути як постійними, так і електромагнітами. Переваги постійного магніту (на відміну від електромагніту):
- компактність;
- не вимагає джерела енергії для роботи.
Недоліками є неможливість регулювання сили магнітного потоку і розмагнічування з плином часу.
Вид порушення ДПТ залежить від місця приєднання обмотки полюсів. У зв'язку з цим розрізняють незалежне збудження мотора (обмотка збудження живиться від стороннього джерела) і самозбудження (обмотка збудження приєднана до обмотки якоря). Двигуни з самозбудженням носять більш короткі назви:
- шунтові (паралельне з'єднання обмоток);
- серієсний (послідовне з'єднання обмоток);
- компаундні (змішане з'єднання обмоток).
Електромотори застосовуються в різних галузях промисловості і сільського господарства, а також побутових установках. Їх різноманітність велике. Основні типи ДПТ:
- традиційного призначення;
- спеціального призначення.
Особливості роботи вентильних двигунів
Вентильні двигуни відносяться до електричних машин спеціального призначення. Своєю назвою вони зобов'язані застосуванню в них пристроїв для випрямлення струму - вентилів. Переваги вентильних електродвигунів:
- зміна швидкості обертання в широких межах;
- більш високий коефіцієнт корисної дії через зменшення магнітних втрат внаслідок малого магнітного опору;
- навіть при піковому навантаженні робочі характеристики досить непогані.
Поряд з перевагами, вони мають і деякі недоліки. Але значення їх не велика. Основними є:
- гучність;
- управління вимагає певної кваліфікації обслуговуючого персоналу;
- висока ціна.
 Області застосування їх різні: на виробництві з видобутку нафти, в хімічній промисловості та установках для буріння свердловин.
Області застосування їх різні: на виробництві з видобутку нафти, в хімічній промисловості та установках для буріння свердловин.
Основна різниця між вентильним і звичайним двигуном полягає в конструкції. У вентильного немає деяких звичних частин конструкції: колектора і щіткового механізму. Замість цього встановлено комутатор (інвертор), за допомогою якого здійснюється управління вентильним двигуном. На інвертор надходить сигнал від датчика положення ротора.
Датчиками положення ротора можуть бути трансформаторні або індуктивні безконтактні елементи. Найбільш поширеними є датчики електрорушійної сили Холла. Такий пристрій складається з невеликої пластини напівпровідникового матеріалу. На ній знаходяться контактні ланки, до яких припаяні висновки, з'єднані з джерелом живлення. Висновки вихідного сигналу також припаиваются до відповідних ланкам пластини. Вимогами до датчиків положення ротора є:
- компактність;
- мінімальне значення потужності на вході;
- велика кратність сигналу як максимального, так і мінімального;
- надійна робота при будь-яких умовах навколишнього середовища.
 Комутатор виконаний на напівпровідниках. Його завдання аналогічне завданню щітково-колекторного вузла в звичайних двигунах і полягає в зміні напрямку струму. На осерді станини знаходиться обмотка якоря, а на роторі - постійний магніт. Така конструкція усуває можливість ковзання контакту на якорі.
Комутатор виконаний на напівпровідниках. Його завдання аналогічне завданню щітково-колекторного вузла в звичайних двигунах і полягає в зміні напрямку струму. На осерді станини знаходиться обмотка якоря, а на роторі - постійний магніт. Така конструкція усуває можливість ковзання контакту на якорі.
У вентильного двигуна струм в фазах синусоїдального вигляду. Порушення у нього може бути двох видів:
- електромагнітне;
- Магнітоелектричний.
При електромагнітному збудженні обмотка збудження розташовується на полюсах. Вона підключається до мережі завдяки контактним кільцям, розміщеним на валу ротора. Таким чином, створення магнітного поля відбувається електромагнітним шляхом.
У разі магнітоелектричного збудження ні в ланцюзі збудження, ні в якірного ланцюга змінного контакту не буде. Постійні магніти будуть виступати в якості полюсів. Ці двигуни називаються безколекторними електродвигунами.
Властивості безколекторних приладів
 Безколекторний двигун постійного струму (БДПС) істотно відрізняється від вентильного двигуна. Його ток в фазах виглядає трапецеїдально. БДПС влаштований простіше: широтно-імпульсна модуляція замінена на комутацію 120 або 180 градусів. Головними завданнями безщітковими двигуна є точне положення ротора в необхідному проміжку і висока швидкість обертання.
Безколекторний двигун постійного струму (БДПС) істотно відрізняється від вентильного двигуна. Його ток в фазах виглядає трапецеїдально. БДПС влаштований простіше: широтно-імпульсна модуляція замінена на комутацію 120 або 180 градусів. Головними завданнями безщітковими двигуна є точне положення ротора в необхідному проміжку і висока швидкість обертання.
Конструкція може бути двох видів: з магнітами на рухомої частини (якорі) або нерухомої (статорі). У пристроях автоматики для охолодження використовуються приводи з конструкцією магнітів на якорі. Характерною їх особливістю є швидке досягнення високих обертів.
 У системах обладнання для медицини поширене розміщення магнітів на статорі. Ці мікромашини називаються високомоментними двигунами. Швидкість обертання у них не настільки велика, але через відсутність обмотки збудження і наявності постійних магнітів вони непогано справляються з роботою при перевантаженнях і зберігають точність позиції в просторі.
У системах обладнання для медицини поширене розміщення магнітів на статорі. Ці мікромашини називаються високомоментними двигунами. Швидкість обертання у них не настільки велика, але через відсутність обмотки збудження і наявності постійних магнітів вони непогано справляються з роботою при перевантаженнях і зберігають точність позиції в просторі.
Сигнал на обмотки таких електромашин буде надходити від драйвера, завданням якого є управління крутним моментом. Для того щоб якір повернувся на певний кут, необхідно подати на потрібні обмотки напруга. Плавність обертання зберегти не вдасться, але високій швидкості обертання домогтися можна.
Різниця між колекторними і безколекторними двигунами складається як в будові, так і в процесі роботи. У контролері колекторні двигуни не потребують, а ось робота бесщеточного мотора без його участі неприпустима. Переваги безщіткових двигунів:
- можливість роботи в умовах з різними характеристиками навколишнього середовища;
- тривалий термін використання;
- надійність в роботі.
 Недоліком є вартість. Вона досить висока через наявність в будові напівпровідникового комутатора, постійного магніту і чутливих елементів.
Недоліком є вартість. Вона досить висока через наявність в будові напівпровідникового комутатора, постійного магніту і чутливих елементів.
Зібрати вентильний або ДПТ своїми руками - справа невдячна. Матеріали, складність роботи і витрачений час будуть коштувати набагато дорожче, ніж витрачені кошти на покупку двигуна заводського виготовлення. Але надійність і безпеку теж будуть в кілька разів вище.
Підбір цих електромашин необхідно проводити, спираючись на характеристики драйверів з каналами широтно-імпульсної модуляції:
- максимальне напруження при тривалому використанні;
- максимальна швидкість обертання;
- допустима сила струму;
- частота струму (звичайні пристрої 7-8 кГц, більш вдосконалені моделі - 16-32 кГц).
 Головними ланками при управлінні безколекторним двигуном є датчики положення. Сигнал з них передається на контролер, і внаслідок цього відбуваються перемикання. Але можлива робота цих пристроїв і без датчиків. В цьому випадку грає роль перепад напруги на обмотці, яка в певний момент є неробочий.
Головними ланками при управлінні безколекторним двигуном є датчики положення. Сигнал з них передається на контролер, і внаслідок цього відбуваються перемикання. Але можлива робота цих пристроїв і без датчиків. В цьому випадку грає роль перепад напруги на обмотці, яка в певний момент є неробочий.
За кількістю фаз багато мотори є трифазними, і для управління ними необхідний додатковий вузол в пристрої - випрямляч постійного струму в трифазний імпульсний. Управління трифазним безщітковим двигуном постійного струму також викликає деякі складнощі через паралельного контролю декількох параметрів. Оскільки електричні машини пристрої оборотні, то безколекторний мотор можна підключити як генератор.
Будова крокової типу обладнання
Різновидом двигунів змінного струму спеціального призначення є крокові. Їх іноді називають імпульсними. Вони відносяться до синхронним електромоторам спеціального призначення. Принцип їх роботи полягає в тому, що стрибкоподібні кроки на виході отримують завдяки імпульсам напруги на вході. Види крокових двигунів з вигляду ротора:
- збуджені;
- реактивні.
Будова пристрою з активним ротором передбачає наявність в ньому електромагнітів або постійних магнітів. У двигунах з реактивним ротором обмотки збудження немає. Ротор виготовляється з магнітомягкого матеріалу.
Обмотка управління знаходиться на нерухомої частини - статорі. За кількістю фаз вона може бути різною, але найбільш поширеними є трифазні обмотки.
Принцип дії
 Якщо у крокової двигуна на статорі є дві пари полюсів з двома обмотками управління, то його обертання буде залежати від подачі напруги на обмотку управління. При подачі сигналу на обмотку управління, яка знаходиться на першій парі, ротор повернеться і займе положення по її осі. Коли на обмотці другої пари полюсів з'явиться сигнал, ротора доведеться зайняти положення між цими полюсами.
Якщо у крокової двигуна на статорі є дві пари полюсів з двома обмотками управління, то його обертання буде залежати від подачі напруги на обмотку управління. При подачі сигналу на обмотку управління, яка знаходиться на першій парі, ротор повернеться і займе положення по її осі. Коли на обмотці другої пари полюсів з'явиться сигнал, ротора доведеться зайняти положення між цими полюсами.
При відключенні сигналу на обмотці першої пари і залишився сигналі на обмотці управління другої пари полюсів ротор повернеться на їх вісь. Таким чином, при обертанні він начебто буде здійснювати кроки, тому й має таку назву. Кроки двигуна (кут повороту ротора) з двома парами полюсів будуть дорівнювати 45 градусам. Система комутації буде чотиритактної.
Для двотактної системи комутації при такій же кількості пар полюсів необхідно, щоб сигнал надходив завжди тільки на одну певну обмотку управління конкретної пари полюсів. Тоді і кут повороту ротора зміниться і становитиме 90 градусів.
Щоб принцип роботи крокового двигуна був зрозумілий навіть для чайників, необхідно звернути увагу на схему.

Ротор буде займати положення в просторі проти тієї пари полюсів, на обмотці якої буде подано харчування. Якщо ж харчування подано дві на обмотки сусідніх полюсів, ротор займе положення між ними. Чим менше значення кроку двигуна, тим точніше і стійкіше його робота.
Для роботи крокового двигуна необхідний комутатор. Його завданням є перетворення імпульсів управління певній послідовності в прямокутні імпульси в системі з необхідною кількістю фаз.
При великому навантаженні на двигун точність повороту ротора буде порушена. Він буде повертатися з деяким відставанням, яке є кутом статичної помилки. При холостому ході крокової двигуна значення кута статичної помилки дорівнює нулю.
Так як швидкість протікання процесів роботи обернено пропорційна опору керуючих обмоток, то для того, щоб прискорити обертання ротора, застосовуються резистори. Їх приєднують послідовно в ланцюг керуючих обмоток статора. Оцінюють економічність роботи за основним показником - значенням потужності на вході.